Abstract
To deploy safe and agile robots in cluttered environments, there is a need to develop fully decentralized controllers that guarantee safety, respect actuation limits, prevent deadlocks, and scale to thousands of agents. Current approaches fall short of meeting all these goals: optimization-based methods ensure safety but lack scalability, while learning-based methods scale but do not guarantee safety. We propose a novel algorithm to achieve safe and scalable control for multiple agents under limited actuation. Specifically, our approach includes: (i) learning a decentralized neural Integral Control Barrier function (neural ICBF) for scalable, input-constrained control, (ii) embedding a lightweight decentralized Model Predictive Control-based Integral Control Barrier Function (MPC-ICBF) into the neural network policy to ensure safety while maintaining scalability, and (iii) introducing a novel method to minimize deadlocks based on gradient-based optimization techniques from machine learning to address local minima in deadlocks. Our numerical simulations show that this approach outperforms state-of-the-art multi-agent control algorithms in terms of safety, input constraint satisfaction, and minimizing deadlocks. Additionally, we demonstrate strong generalization across scenarios with varying agent counts, scaling up to 1000 agents.
Proposed Approach
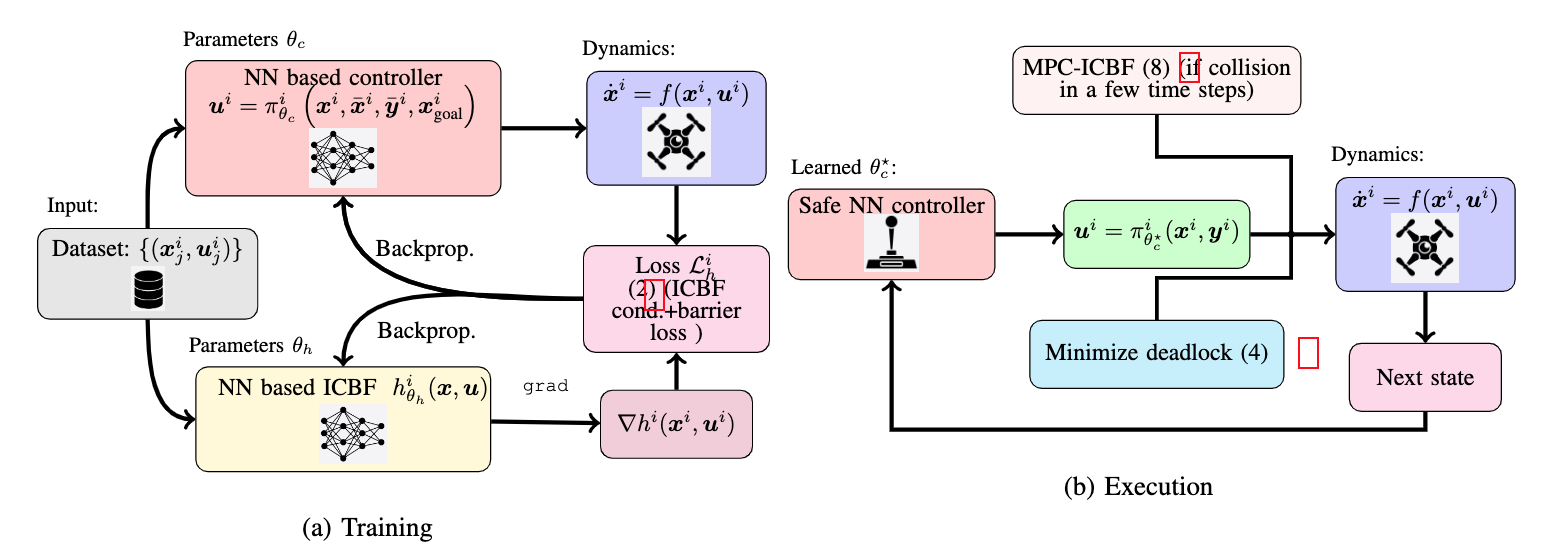
Our proposed approach jointly learns a safe decentralized control policy and an Integral Control Barrier Functions (ICBF) based certificate to ensure safety as well as input constraint satisfaction. The approach is divided into two main phases: Training and Execution.
Training Phase: The first step involves the joint learning of the Neural Integral Control Barrier Function (NICBF) certificates and a decentralized safe control policy that enables the N agents to reach their respective goals. Since the control policies are parameterized by neural networks, they do not provide complete safety guarantees for the agents. Furthermore, as N increases, the likelihood of deadlock increases.
Execution Phase: To address these limitations, the second step involves developing theoretical frameworks to augment the NN policy from the first step, ensuring collision avoidance and minimizing deadlocks. For complete collision avoidance guarantees, we switch to a decentralized MPC-ICBF control policy whenever a potential collision with neighbors is detected using the NN policy. We draw an analogy between deadlocks and minimizing non-convex loss functions and propose a method to modify the control input to reduce deadlocks.
Environments
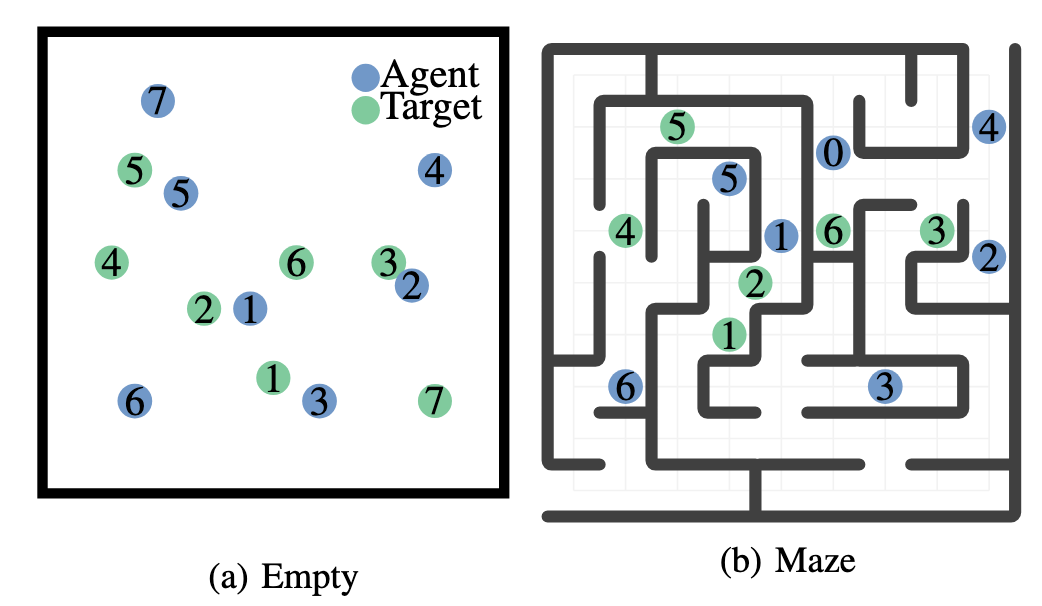
The experiments in this research were conducted in two distinct environments: an empty environment and a maze environment.
Collision avoidance
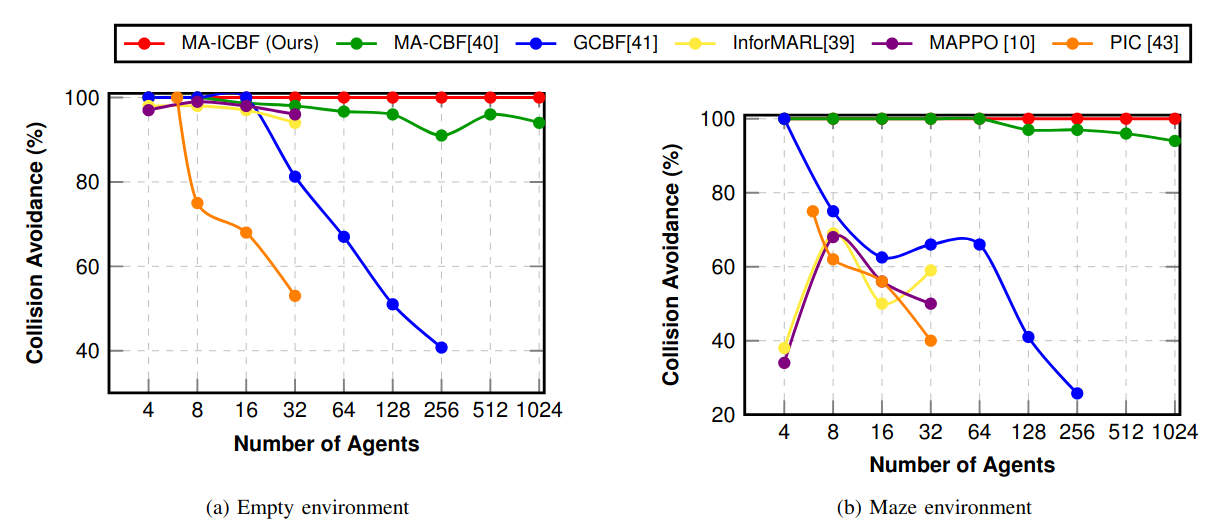
Our proposed approach guarantees 100% collision avoidance, regardless of the number of agents in both empty as well as maze environments. This scalability feature is particularly significant, as it allows our approach to handle scenarios with more than 1000 agents effectively.
Deadlocks
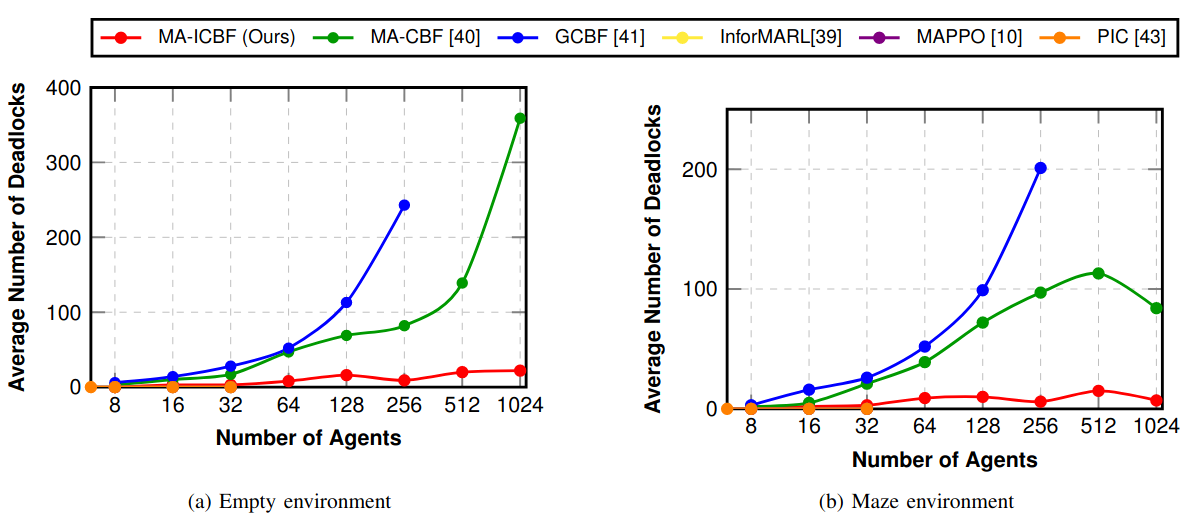
As observed, there is a significant reduction in deadlocks among agents in both empty and maze environments by leveraging our proposed deadlock minimization mechanism. Furthermore, the average number of deadlocks increases with the number of agents. However, our proposed method MA-ICBF successfully minimizes deadlocks while ensuring that the trajectories are safe. In addition, the safety and scalability of MA-ICBF are not compromised during deadlock minimization.
Input constraint satisfaction
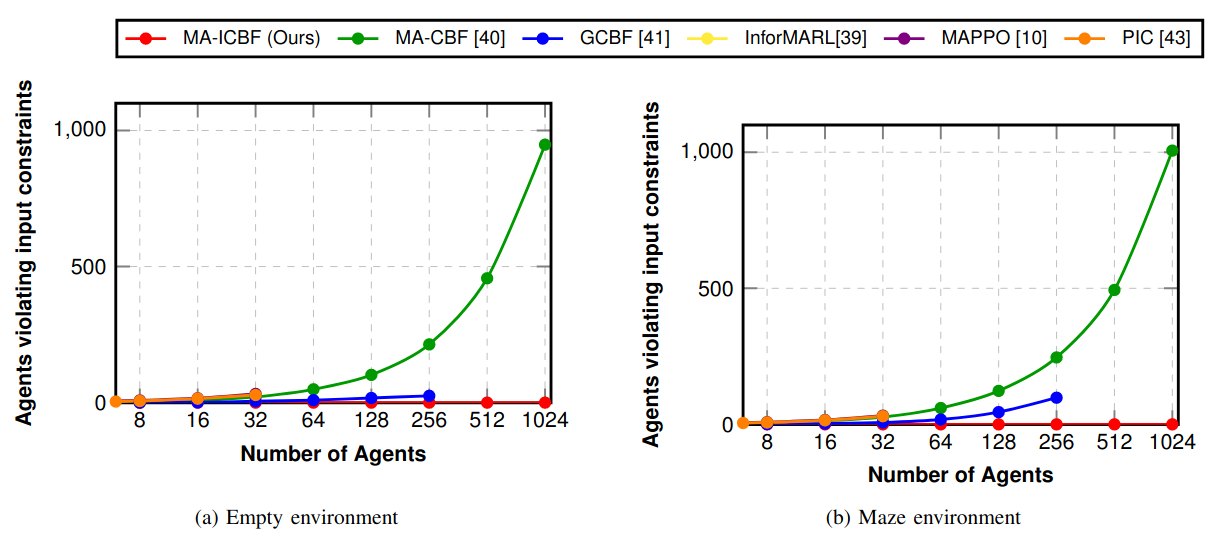
In real-world scenarios, robots have limited actuation capabilities and cannot exceed certain control limits. Therefore, it becomes critical for the designed safe decentralized controller to satisfy input constraints to ensure the feasible deployment of robots. As observed from the Fig., our proposed approach (MA-ICBF) successfully keeps all agents within these constraints, with no violations. In contrast, prior methods show a significant increase in input constraint violation (especially for 1024 agents).
Computational time
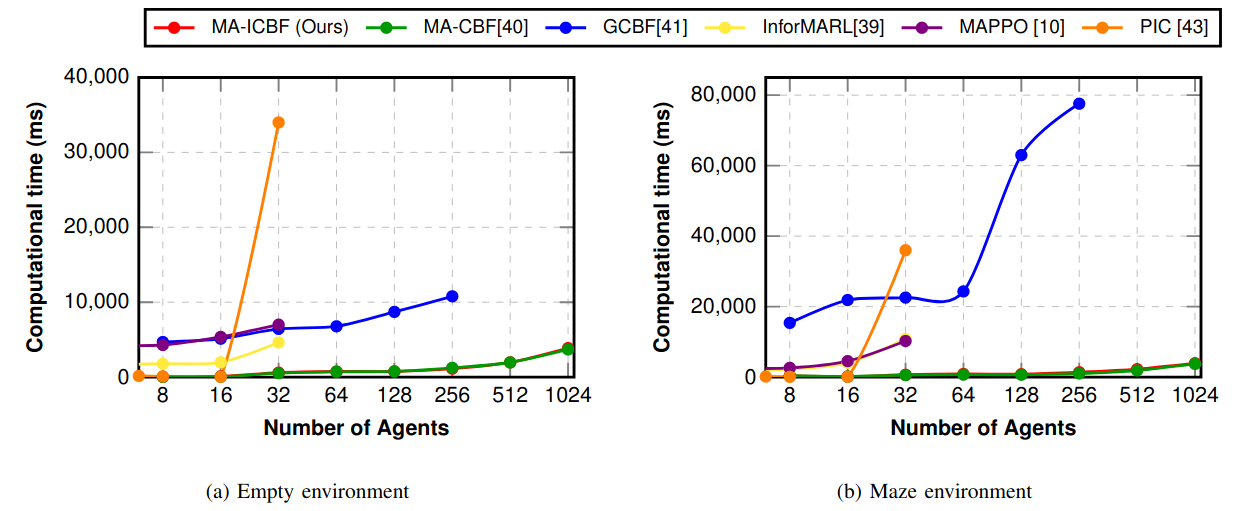
MA-ICBF can provide safety guarantees as well as input constraint satisfaction even for a large number of agents with compromising on the overall computational load (runtime in ms) as the number of agents increases, thereby showing good scalability.
BibTeX
@article{zinage2024decentralized,
title={Decentralized Safe and Scalable Multi-Agent Control under Limited Actuation},
author={Zinage, Vrushabh and Jha, Abhishek and Chandra, Rohan and Bakolas, Efstathios},
journal={arXiv preprint arXiv:2409.09573},
year={2024}
}